Caption: Mathematical Model Catalog (1892 - German)
This is a reduced-resolution page image for fast online browsing.
EXTRACTED TEXT FROM PAGE:
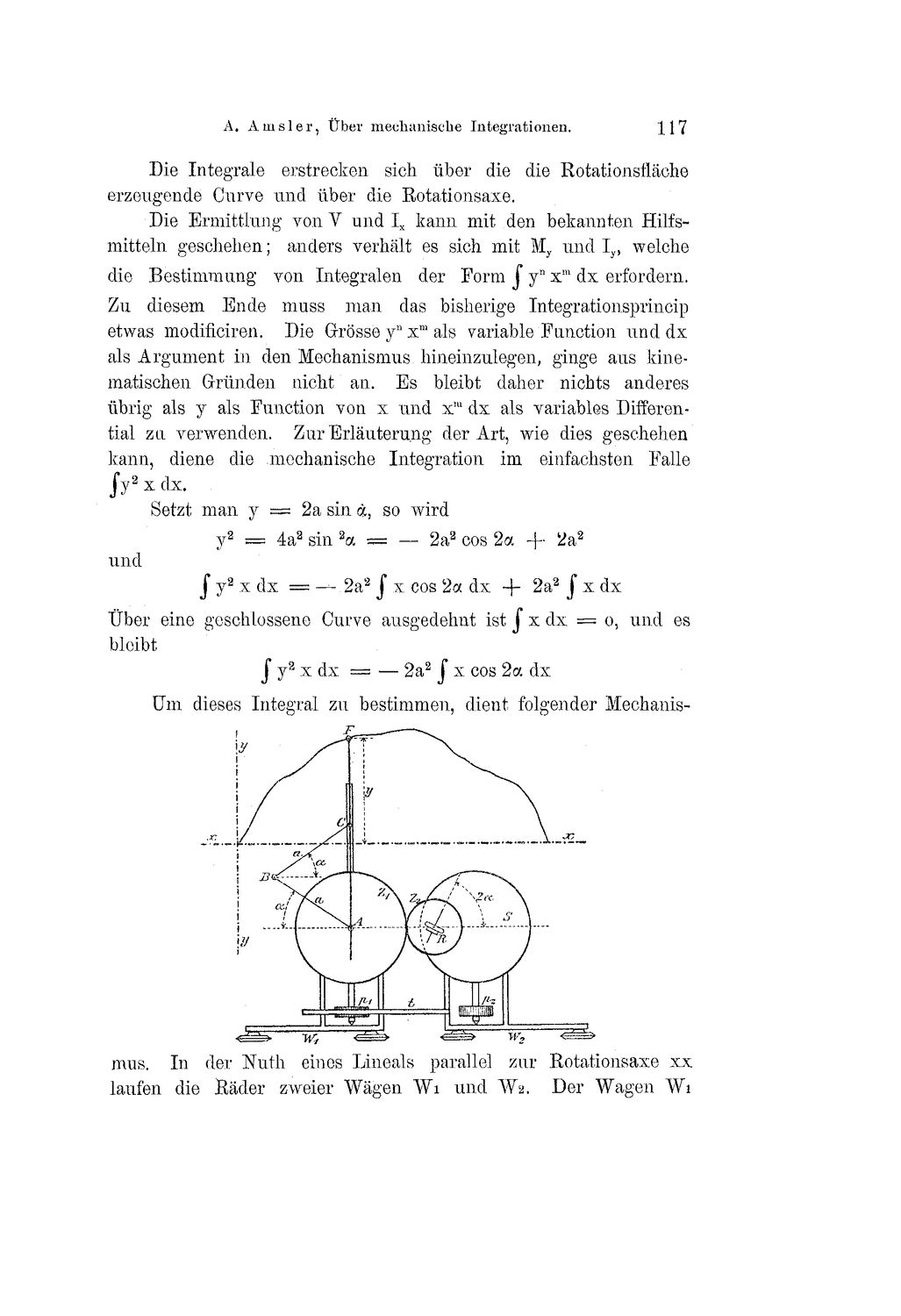
A. A rosier, Uber mechanische Integrationen. H7 Die Integrale erstrecken sich liber die die Rotationsttache erzeugende Curve und liber die Rotationsaxe. Die Ermittlung von Y und Ix kann mit den bekannten Hilfsmitteln geschehen; anders verhalt es sich mit My und Iy, welche die Bestimmung von Integralen der Form J yn xm dx erfordern. Z u diesem Ende muss m a n das bisherige Integrationsprincip etwas modificiren. Die Grosse y11 xm als variable Function und dx als Argument in den Mechanismus hineinzulegen, ginge aus kinematischen Grlinden nicht an. Es bleibt daher nichts anderes ubrig als y als Function von x und xm dx als variables Differential zli verwenden. Zur Eiiauteru.ng der Art, wie dies geschehen kann, diene die mechanische Integration im einfachsten Falle Jy2 x dx. Setzt m a n y = 2a sin a, so wird y2 = unci J y2 x dx == --.2a2 J x cos 2a dx + 2a2 J x dx o, unci es 4a2 sin 2a = — 2a2 cos 2a -f • 2a2 "fiber eine geschlossene Curve ausgedehnt ist J x dx = bleibt J y2 x dx = — 2a2 J x cos 2a dx Urn dieses Integral zu bestimmen, client folgender Mechanis- mus. In der ISTuth ein.es Lineals parallel zur Rotationsaxe x x laufen die Rader zweier W a g e n W i unci W 2 . Der W a g e n W i
| 









