| |
| |
Caption: Mathematical Model Catalog (1892 - German)
This is a reduced-resolution page image for fast online browsing.
EXTRACTED TEXT FROM PAGE:
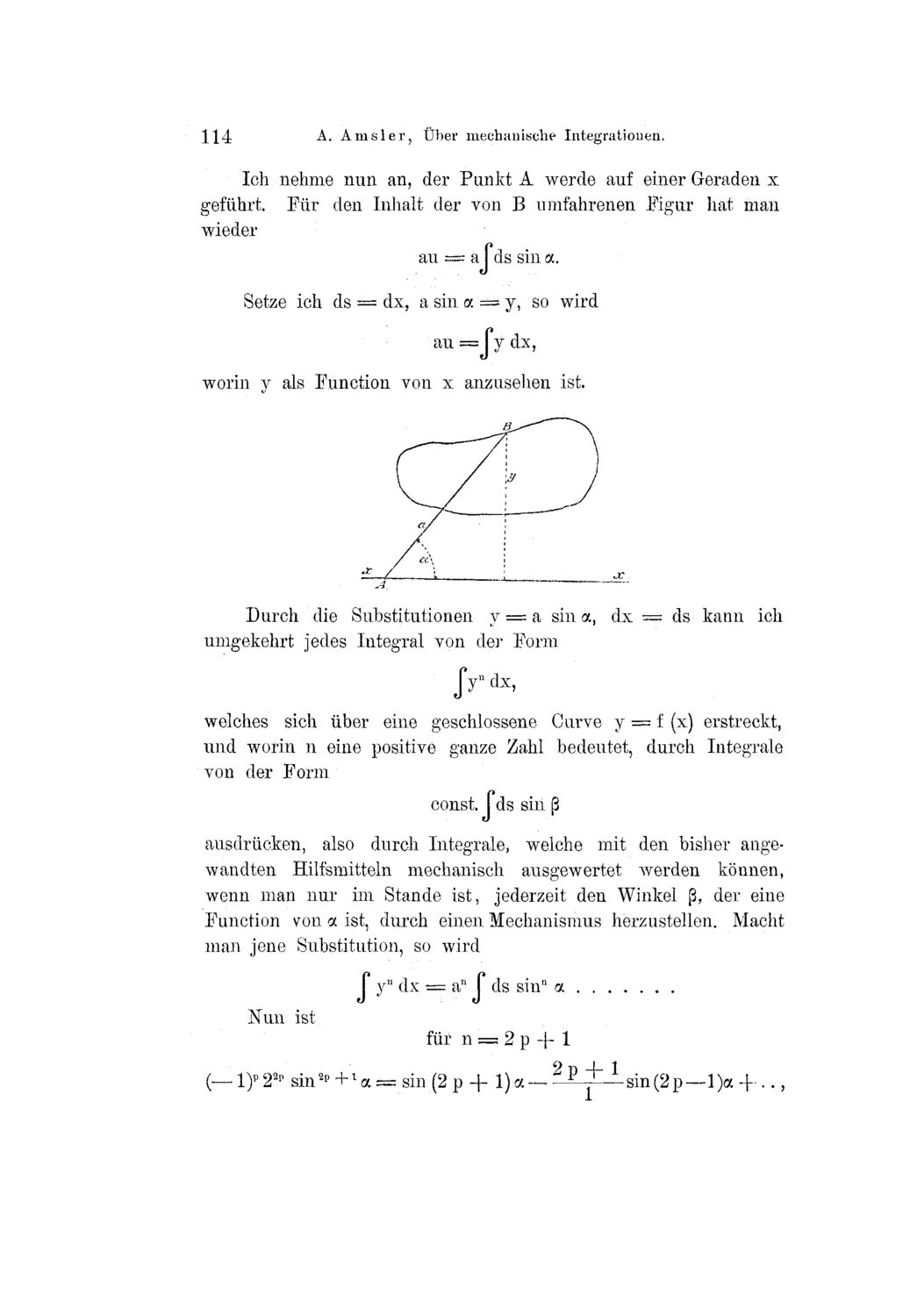
114 A. Amsler, Uber mechanische Integratiouen. Ich nehme nun an, der Punkt A werde auf einer Geraden x geftihrt. Fiir den Inhalt der von B umfahrenen Figur hat m a n wieder au == a ds sin a. Setze ich ds = dx, a sin a == y, so wird au = I y dx, worin y als Function von x anzusehen ist. Durch die Substitutionen y = a sin a, dx = umgekehrt jedes Integral von cler Form ds kann ich $ r dx, welches sich iiber eine geschlossene Curve y = f (x) erstreckt, und worin n eine positive ganze Zahl bedeutet, durch Integrate von der F o r m const, I ds sin ( ; . 3 ausdrucken, also durch Integrate, welche mit den bisher angewandten Hilfsmitteln mechanisch ausgewertet werden konnen, w e n n m a n n u r i m Stande ist, jederzeit den Winkel [3, der eine Function v o n a ist, durch einen M e c h a n i s m u s herzustellen. M a c h t m a n jene Substitution, so wird j jn d x = an I ds sinn a N u n ist fiir n = ; 2 p + 1 (—l)p22p sin2p+la = sin (2 p + l)a~^i—sin(2p—l)a + ..,
| |











