| |
| |
Caption: Mathematical Model Catalog (1911 - German)
This is a reduced-resolution page image for fast online browsing.
EXTRACTED TEXT FROM PAGE:
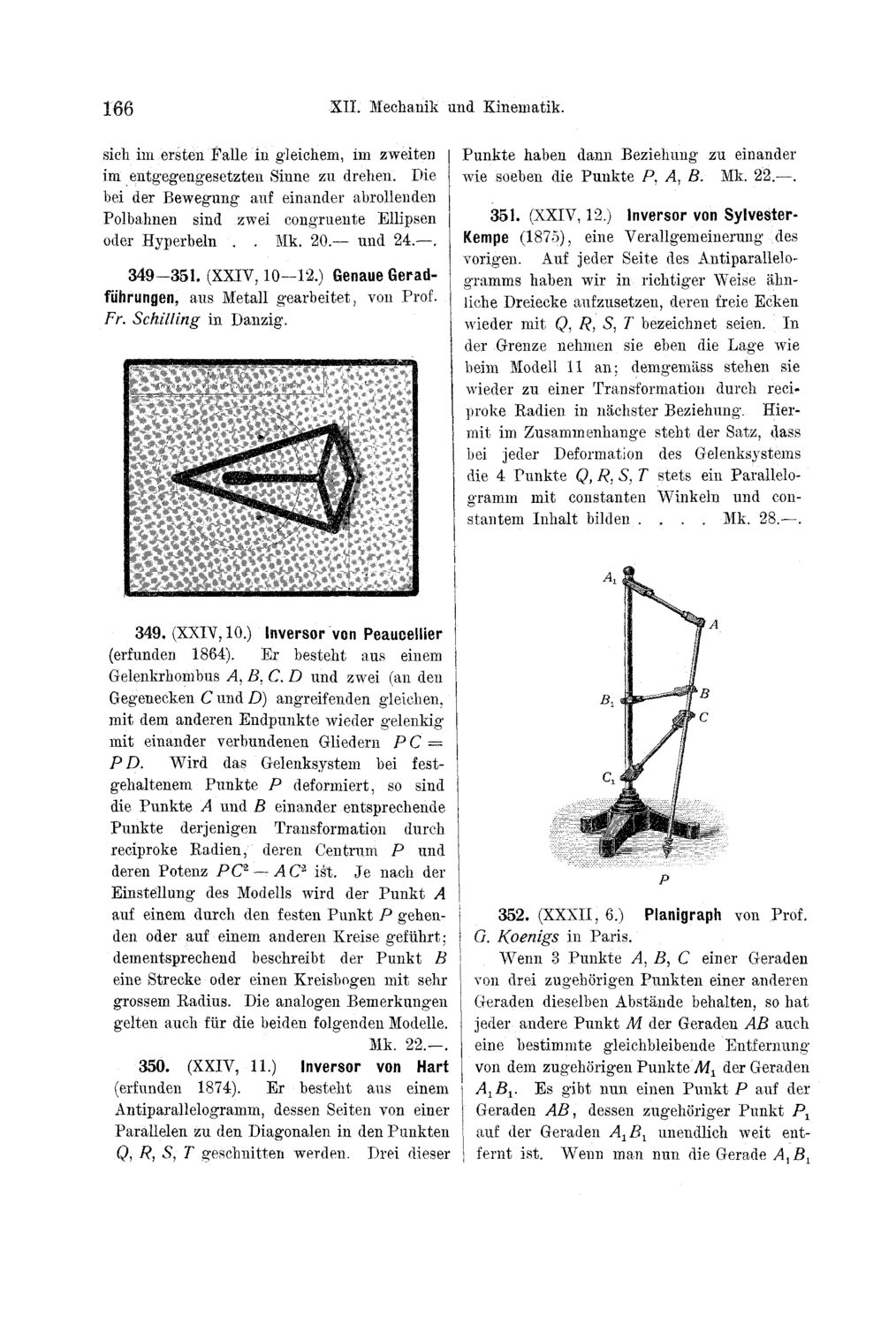
166 XII. Mechanik und Bjnematik. Punkte haben dann Beziehung zu einander wie soeben die Punkte P, A, B. Mk. 22.—. 351. (XXIV, 12.) Inversor von SylvesterKempe (1875), eine Verallgemeinerung des vorigen. Auf jeder Seite des Antiparallelogramms haben wir in rich tiger Weise ahniiche Dreiecke aufzusetzen, deren freie Ecken wieder mit Q, R, S, T bezeichnet seien. In der Grenze nehmen sie eben die Lage wie beim Modell 11 an; demgemass stehen sie wieder zu einer Transformation durch reciproke Badien in nachster Beziehung. Hiermit im Zusammenhange steht der Satz, dass bei jeder Deformation des Gelenksystems die 4 Punkte Q, R, S, T stets ein Parallelogramm mit constanten Winkeln und constantem Inhalt bilden . . . . Mk. 28.—. sich im ersten Falle in gieichem, im zweiten im entgegengesetzten Sinne zu drehen. Die bei der Bewegung auf einander abrollenden Polbahnen sind zwei congruente Ellipsen oder Hyperbeln . . Mk. 2 0 . — und 24.—. 349-351. (XXIV, 10—12.) Genaue Geradfiihrungen, aus Metall gearbeitet, von Prof. Fr. Schilling in Danzig. 349. (XXIV, 10.) Inversor von Peauceilier (erfunden 1864). Er besteht aus einem Gelenkrhombus 'A, B, C, D und zwei (an den Gegenecken C und D ) angreifenden gieichem mit dem anderen Endpunkte wieder gelenkig mit einander verbundenen Gliedern P C = P D. Wird das Gelenksystem bei festgehaltenem Punkte P deformiert, so sind die Punkte A und B einander entsprechende Punkte derjenigen Transformation durch reciproke Radien, deren Centrum P und deren Potenz P C 2 — AC'2 lit. Je nach der Einstellung des Modells wird der Punkt A auf einem durch den festen Punkt P gehenden oder auf einem anderen Kreise gefiihrt; dementsprechend beschreibt der Punkt B eine Strecke oder einen Kreisbogen mit sehr grossem Radius. Die analogen Bemerkungen gelten auch fiir die beiden folgenden Modelle. Mk. 22.—. 350. (XXIV, 11.) Inversor von Hart (erfunden 1874). Er besteht aus einem Antiparallelogramm, dessen Seiten von einer Parallelen zu den Diagonalen in den Punkten Q, R, $, T geschnitteri werden. Drei dieser 352. (XXXII, 6.) Planigraph von Prof. G. Koenigs in Paris. W e n n 3 Punkte A, B, C einer Geraden von drei zugehorigen Punkten einer anderen Geraden dieselben Abstande behalten, so hat jeder andere Punkt M der Geraden A B auch eine bestimmte gleichbleibende Entfernung von dem zugehorigen PunkteM,^ der Geraden A ± B V Es gibt nun einen Punkt P auf der Geraden A B , dessen zugehoriger Punkt P1 auf der Geraden A1Bl unendlich weit entfernt ist. W e n n m a n nun die Gerade A,B,
| |











